



ASCOLTIAMO
Comprendiamo le reali necessità del cliente e identifichiamo una soluzione personalizzata.

PROGETTIAMO
Ideiamo un processo smart che migliori le prestazioni e aiuti l’azienda a crescere e acquisire quote di mercato.
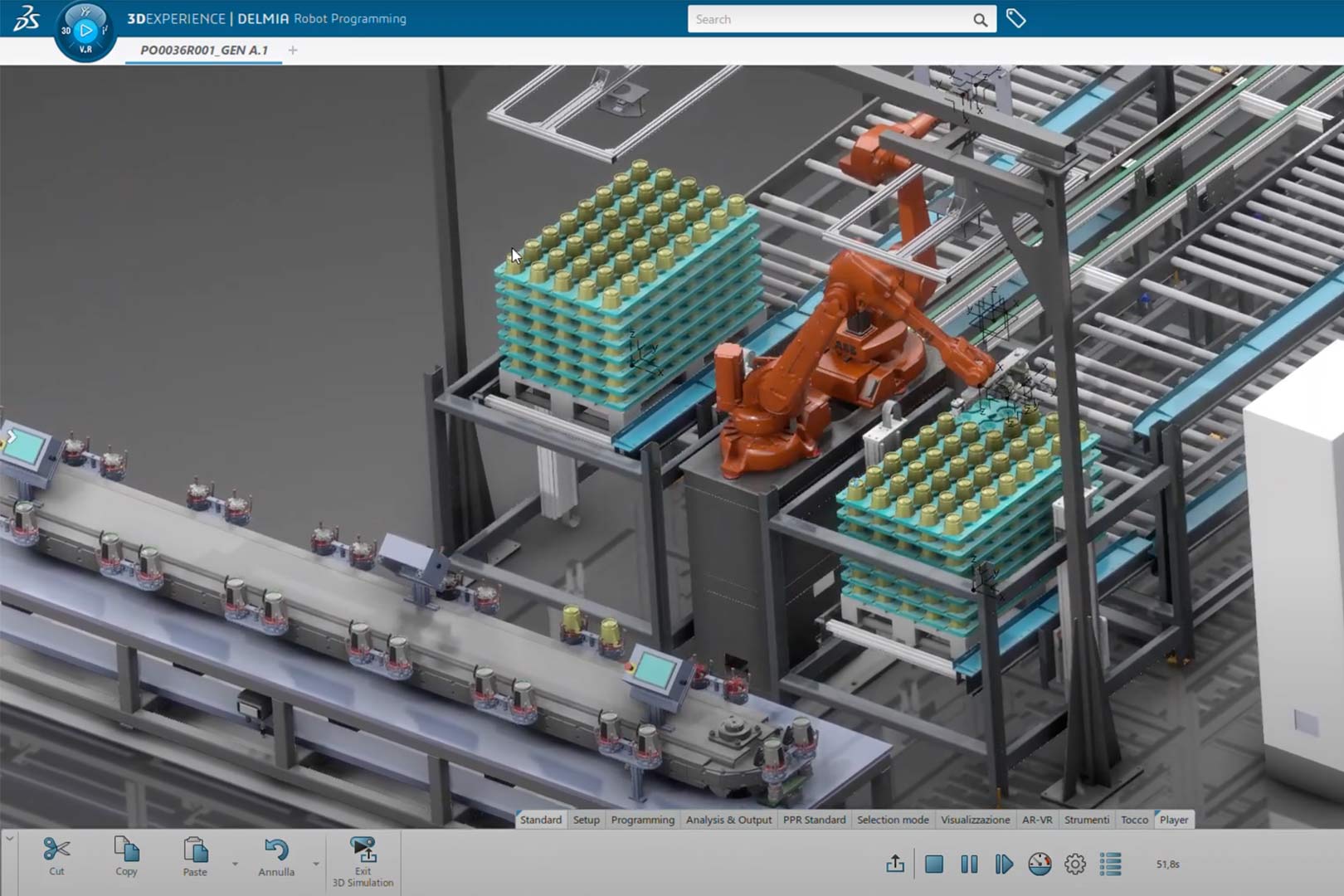
SIMULIAMO
Già nella fase di avanprogetto possiamo simulare il funzionamento della linea, misurandone preventivamente le prestazioni.

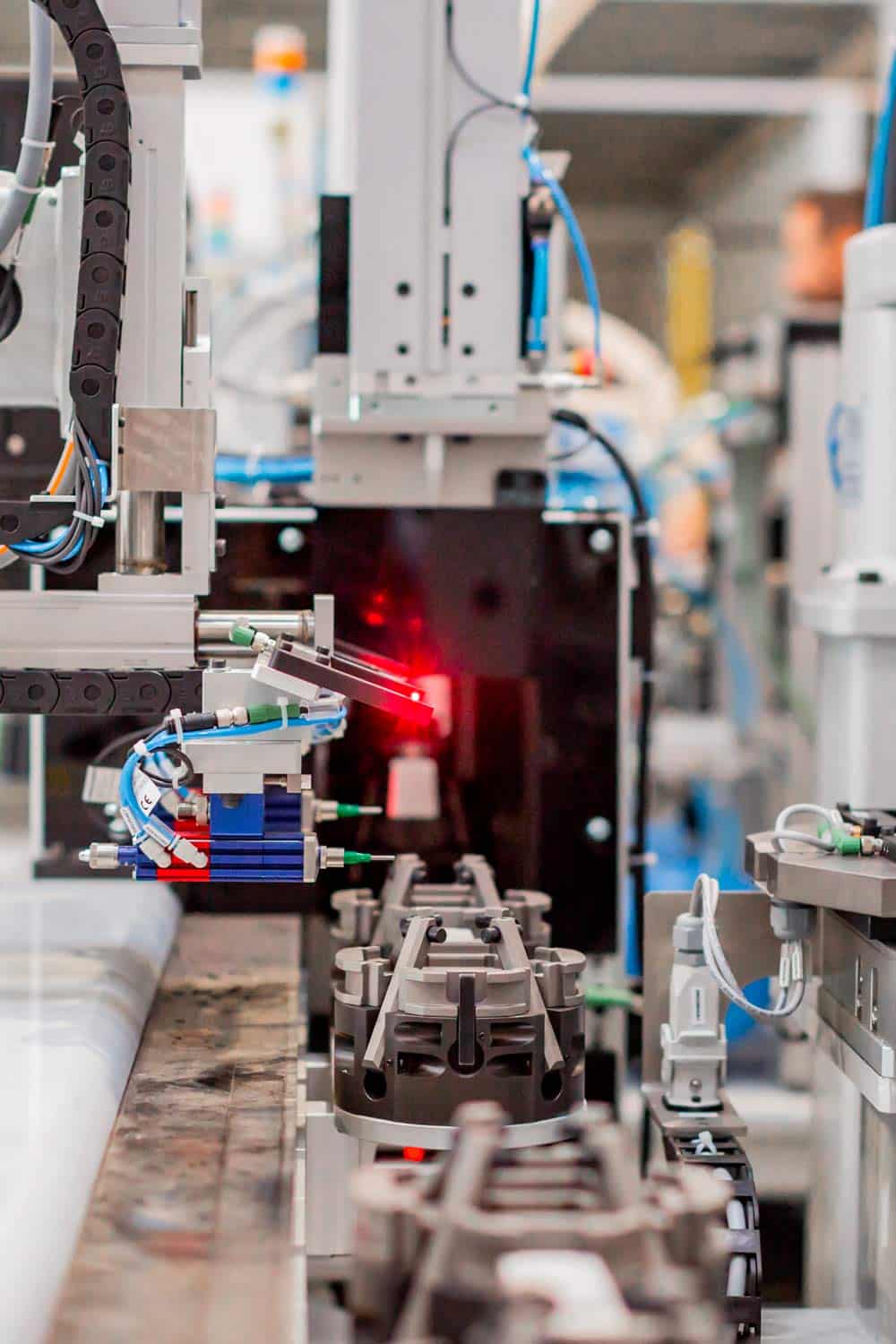
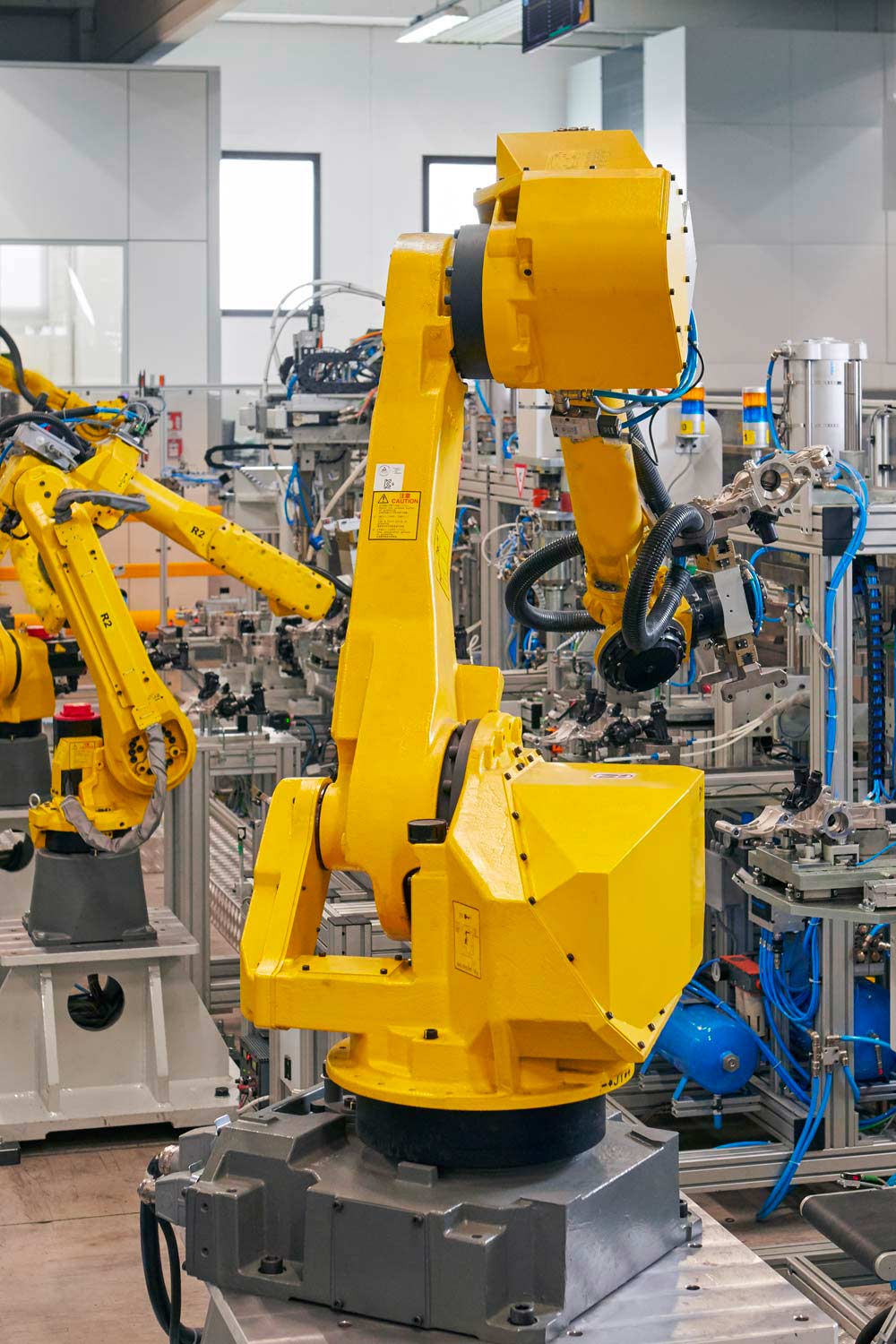
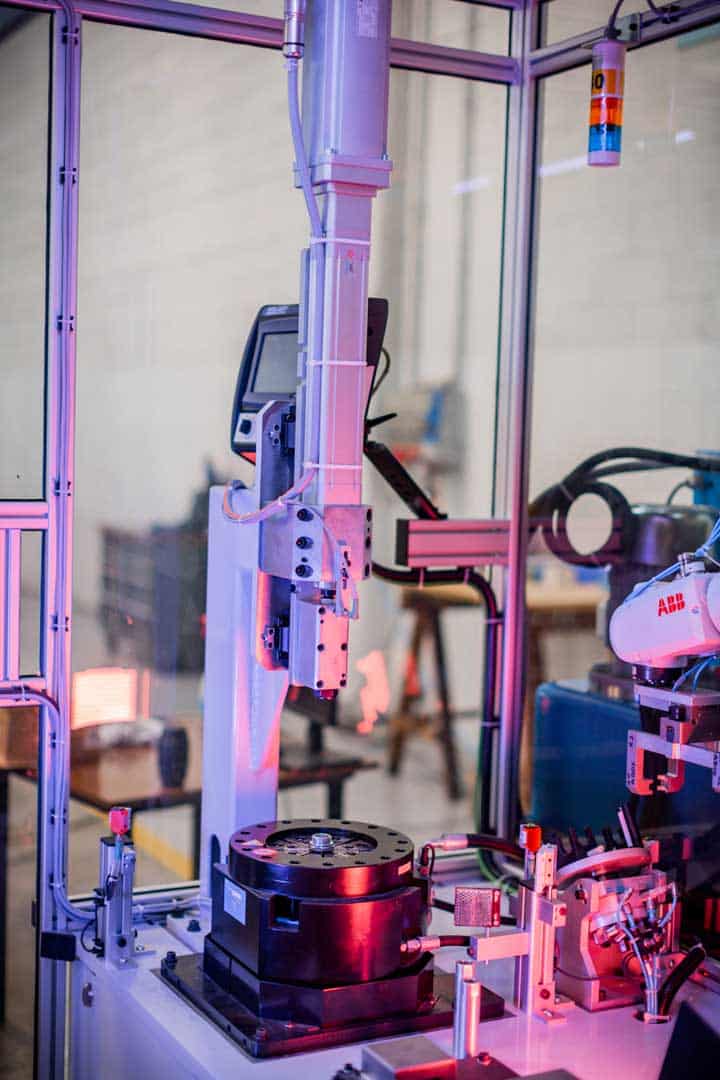
REALIZZIAMO
Diamo forma all’impianto nella nostra azienda, lo testiamo e collaudiamo sia in sede che dal cliente.



 Siamo certificati
Siamo certificati